Sistema de segurança
Este documento descreve o Sistema de Segurança desenvolvido para o projeto Cannabot, com o objetivo de garantir operações seguras do robô e a proteção dos operadores envolvidos. As principais medidas implementadas incluem um botão de parada de emergência e um sistema de detecção de obstáculos com parada automática do robô, visando proporcionar maior controle operacional e prevenir acidentes. A seguir, apresentamos uma análise detalhada do funcionamento de cada uma dessas medidas de segurança.
Botão de Parada de Emergência
Funcionamento
Durante a Sprint 2, a equipe Cannabot apresentou a primeira versão da funcionalidade de parada de emergência do robô, inicialmente implementada através da interface de linha de comando (CLI). Na Sprint 3, com a introdução da interface de usuário mostrada a seguir, foram realizadas alterações significativas na forma de ativação dessa função.
Figura da Central de Controle
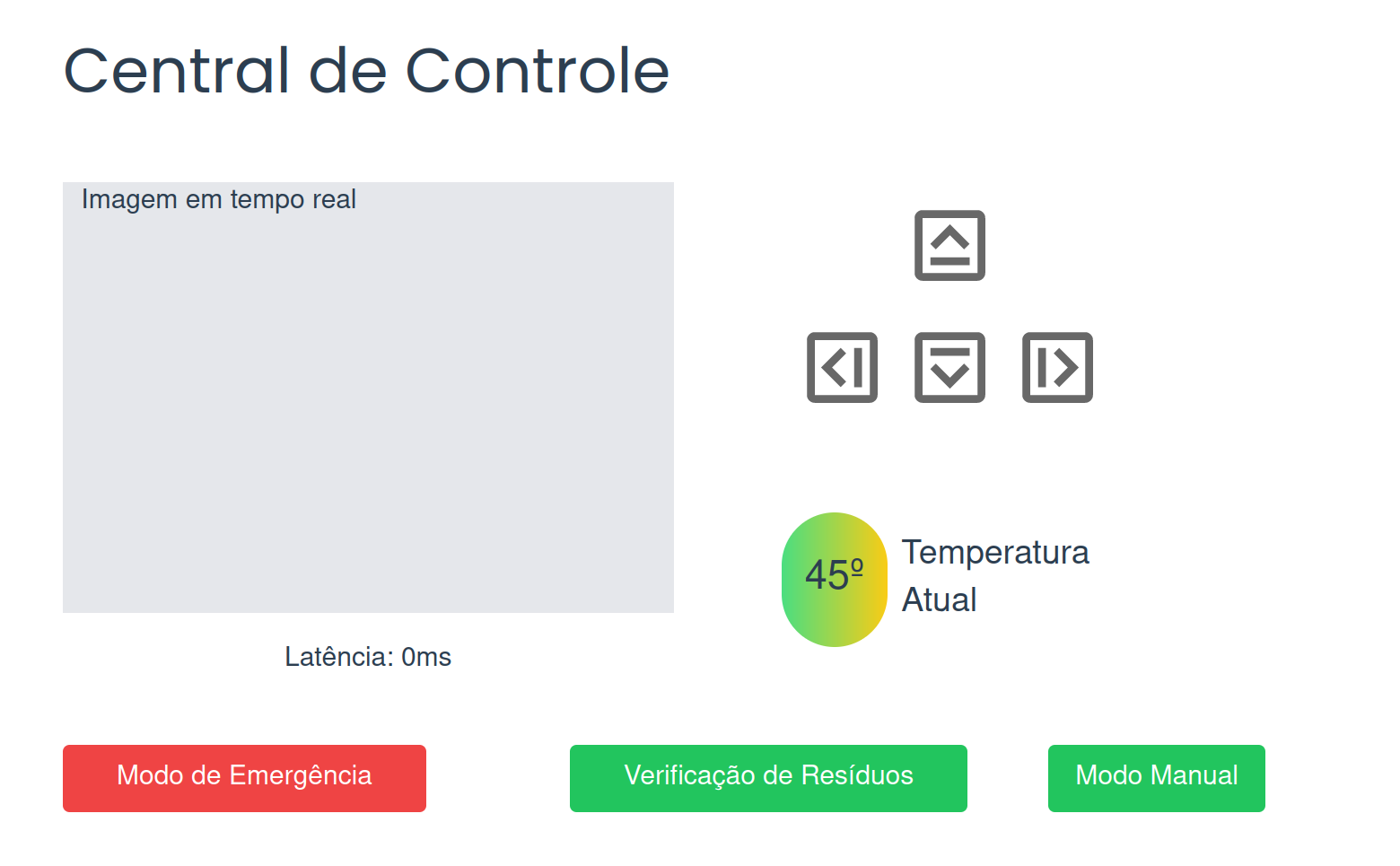
Fonte: Elaborado por Cannabot
No projeto final (sprint 5), mantivemos a ativação da parada de emergência por meio da interface gráfica, conforme a imagem acima. Ao clicar no botão "Modo de Emergência" na tela "Central de Controle" do frontend, o usuário aciona o serviço de emergência. Este serviço Ros, ao ser requisitado, executa a função de parada do robô, fechando a conexão. Dessa forma, mesmo que haja tentativas de movimentar o robô através dos comandos do frontend, ele permanecerá imóvel. A única forma de restabelecer o funcionamento normal é reiniciando o robô manualmente.
Implementação do código
Como explicado no documento de teleoperação do robô, foi criado uma classe ("Robot") que tem por objetivo gerenciar os serviços, tópicos e ações relacionadas a ele. Dentro da classe é implementada as seguintes funções:
def emergency(self):
self.get_logger().info('PARADA DE EMERGÊNCIA ATIVADA')
self.stop()
def stop(self):
self.publisher.publish(Twist())
self.get_logger().info('Parando o robô...')
rclpy.shutdown()
A partir da lógica do websocket, quando o botão é pressionado na interface, é enviado uma mensagem de "emergency", responsável por chamar a função explicitada acima e fechando a conexão com o robô.
A lógica em questão é evidenciada no código a seguir:
@app.websocket("/ws_control")
async def websocket_endpoint(websocket: WebSocket):
await websocket.accept()
clients.add(websocket)
try:
while True:
# Receber o comando de movimento do robô
data = await websocket.receive_text()
print(f"Recebido: {data}")
# Parse do JSON recebido
message_data = json.loads(data)
command = message_data['control'] # Comando de movimento
print(f"Comando: {command}")
# Atualizar o estado do robô
if command not in ['stopped', 'forward', 'left', 'right', 'backward', 'emergency']:
# Enviar mensagem de erro pelo WebSocket
await websocket.send_text(json.dumps({'error': 'Comando inválido'}))
continue
if command == "emergency":
robot.emergency()
break
robot.state = command
except Exception as e:
print(f"Erro: {e}")
await websocket.close()
return app
Detecção de Obstáculo e Parada Imediata
Funcionamento
Uma abordagem crucial para garantir a segurança do sistema foi implementada através da detecção de obstáculos à frente ou atrás do robô. Essa funcionalidade desempenha um papel fundamental na prevenção de colisões e na garantia da integridade do equipamento e do ambiente ao seu redor.
A detecção de obstáculos permite que o robô reaja de forma proativa, impedindo qualquer movimento em direção a esses obstáculos, mesmo que o usuário tente comandar essa ação. Essa capacidade é especialmente vital em ambientes dinâmicos e imprevisíveis.
Para incorporar essa funcionalidade, utilizamos o Lidar. O LIDAR (Light Detection and Ranging) é um sensor que mede distâncias e detecta objetos ao redor do robô. Esse sensor emite um feixe de laser que varre o ambiente, calculando o tempo que leva para o feixe refletir de volta ao sensor após atingir um objeto. No modelo do Turtlebot3, o robô utilizado nesta prova de conceito, o Lidar já está integrado.
Com base nos dados fornecidos pelo Lidar, foi possível implementar uma lógica que impede a colisão do robô. Nessa lógica, é criada uma lista contendo todos os registros do lidar em uma varredura de 360 graus. Como essa lista é dinâmica, foi criada uma variável que armazena o tamanho dessa lista. A partir dessa informação, implementamos a lógica para determinar se há obstáculos à frente ou atrás do robô.
A lógica empregada consiste em dividir a lista em quatro partes para definir os quadrantes que compõem a circunferência do lidar. As variáveis A e B representam, respectivamente, as delimitações do primeiro e do último quadrante, partindo do ângulo 0. Para detectar se um obstáculo está atrás do robô, verificamos se seu índice na lista é maior que A e menor que B, ou seja, se ele está no segundo ou terceiro quadrante. Caso contrário, o obstáculo está à frente do robô.
Consideramos uma distância de 0,2 metros como critério para determinar a presença de um obstáculo.
A partir do momento que um obstáculo é detectado, não é possível pressionar a tecla de controle em sua direção. Ou seja, se é detectado um obstáculo à frente, não é possível mais movimentar o robô para frente, apenas nas outras direções, e vice-versa.
Essa abordagem dinâmica permite que o robô ajuste seu comportamento de acordo com a presença de obstáculos, garantindo uma navegação segura e eficiente em ambientes desafiadores. O monitoramento constante do Lidar e a adaptação contínua do comportamento do robô contribuem significativamente para a segurança e a confiabilidade do sistema como um todo.
Implementação do código
Como explicado no documento de teleoperação do robô, foi criado uma classe ("Robot") que tem por objetivo gerenciar os serviços, tópicos e ações relacionadas a ele. Dentro da classe é implementada a seguinte função, que aplica a lógica do LIDAR explicada anteriormente:
def scan_callback(self, data):
# Obtém os dados do Lidar
ranges = data.ranges
# Verifica se há obstáculos dentro da distância de segurança e enviar o índice da array
if min(ranges) <= self.safe_distance:
min_index = ranges.index(min(ranges))
numero_indices = len(ranges)
# print('Número de índices:', numero_indices)
# Calcular os índices que representam a frente e as traseiras
valor_A = numero_indices // 4
valor_B = valor_A * 3
# print('Valor A:', valor_A)
# print('Valor B:', valor_B)
# print('Índice:', min_index)
# Dividir o array de distâncias em frente (de valor_A até valor_B) e trás (de valor_B até o final mais de 0 até valor_A)
if valor_A < min_index < valor_B:
# print("Obstáculo átras")
# return {'obstacle': 'back'}
if self.lidar_data != 'back':
print('Obstáculo detectado atrás')
self.lidar_data = 'back'
broadcast(json.dumps({'obstacle': 'back'}))
else:
# print("Obstáculo na frente")
# return {'obstacle': 'front'}
if self.lidar_data != 'front':
print('Obstáculo detectado à frente')
self.lidar_data = 'front'
broadcast(json.dumps({'obstacle': 'front'}))
else:
# Se não houver obstáculos próximos, continue em frente
# print('Nenhum obstáculo detectado')
# return {'obstacle': 'none'}
if self.lidar_data != 'none':
print('Nenhum obstáculo detectado')
self.lidar_data = 'none'
broadcast(json.dumps({'obstacle': 'none'}))
A partir do código acima, 'possível aplicar a lógica que ira movimentar o robô, explicitada a seguir:
def timer_callback(self):
twist = Twist()
match self.state:
case 'stopped':
twist.linear.x = 0.0
twist.angular.z = 0.0
case 'forward':
if self.lidar_data == 'none' or self.lidar_data == 'back':
twist.linear.x = 0.2
twist.angular.z = 0.0
case 'left':
twist.linear.x = 0.0
twist.angular.z = 1.0
case 'right':
twist.linear.x = 0.0
twist.angular.z = -1.0
case 'backward':
if self.lidar_data == 'none' or self.lidar_data == 'front':
twist.linear.x = -0.2
twist.angular.z = 0.0
case 'emergency':
self.emergency()
case _:
self.get_logger().warn(f'Invalid state: {self.state}')
self.publisher.publish(twist)
Essa função, define a movimentação que o robô irá fazer dependendo do commando recebido pela interface. A lógica que envia esse comando é aplicada no seguinte código referente ao websocket:
@app.websocket("/ws_control")
async def websocket_endpoint(websocket: WebSocket):
await websocket.accept()
clients.add(websocket)
try:
while True:
# Receber o comando de movimento do robô
data = await websocket.receive_text()
print(f"Recebido: {data}")
# Parse do JSON recebido
message_data = json.loads(data)
command = message_data['control'] # Comando de movimento
print(f"Comando: {command}")
# Atualizar o estado do robô
if command not in ['stopped', 'forward', 'left', 'right', 'backward', 'emergency']:
# Enviar mensagem de erro pelo WebSocket
await websocket.send_text(json.dumps({'error': 'Comando inválido'}))
continue
if command == "emergency":
robot.emergency()
break
robot.state = command
except Exception as e:
print(f"Erro: {e}")
await websocket.close()
return app
Considerações finais
Com base no que foi apresentado, é perceptível que o sistema de segurança do projeto Cannabot é uma solução robusta e confiável para garantir a operação segura do robô em ambientes dinâmicos e imprevisíveis. A integração de um botão de parada de emergência e um sistema de detecção de obstáculos com parada automática proporciona um controle preciso e preventivo, minimizando o risco de acidentes e danos. Essas medidas de segurança, detalhadamente implementadas e explicadas neste documento, asseguram que o robô opere de maneira eficiente e segura, protegendo tanto os operadores quanto o próprio equipamento.